The eccentricity of the stator-rotor assembly can be generated by rlib.
The Concentricity of the stator-rotor set may be disturbed due to various factors including those from assembly process, and the stacked up tolerance. The eccentricity may be simulated in the model. The static and dynamic eccentricity can be set with a simple setting.
Static eccentricity is the case where the rotor is offset from the stator’s center, and the rotor is rotating about its own origin, and the airgap variation is static, is not rotating.
Dynamic eccentricity is the case where the rotor is offset from the stator’s center, and the rotor is rotating about the center of the stator. In this case the airgap variation is not static. It rotates as the rotor rotates.
Code implementations
Motor.Rotor.Offset.x=0.3
Motor.Rotor.Offset.y=0.1
Motor.Rotor.Offset.RotateAboutNewOrigin=1 // setting this to 1 results in static eccentricity. Setting this to 0 results in dynamic eccentricity.
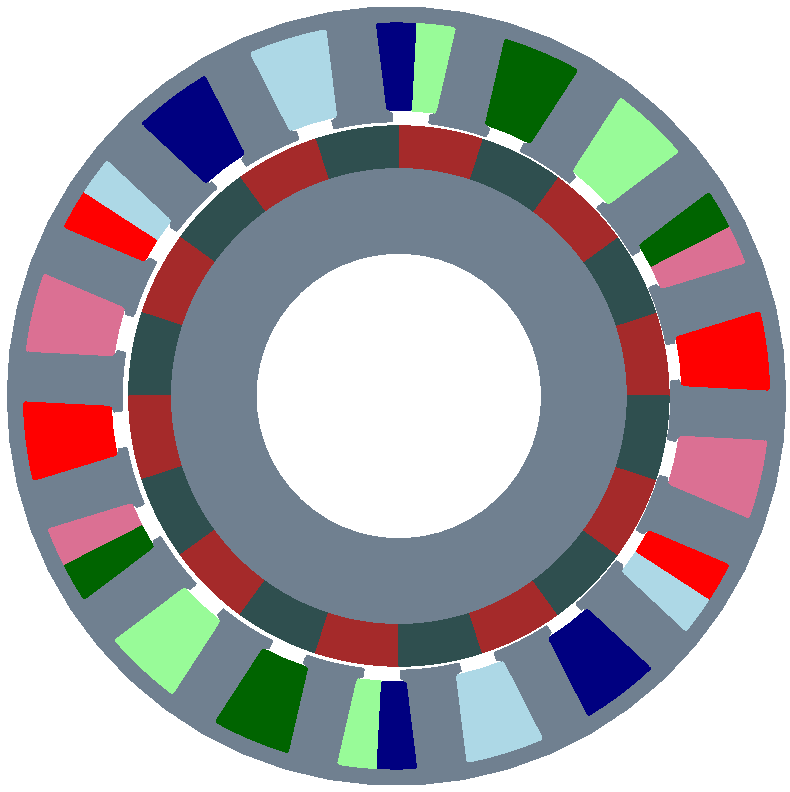
Motor models
Outer rotor motor
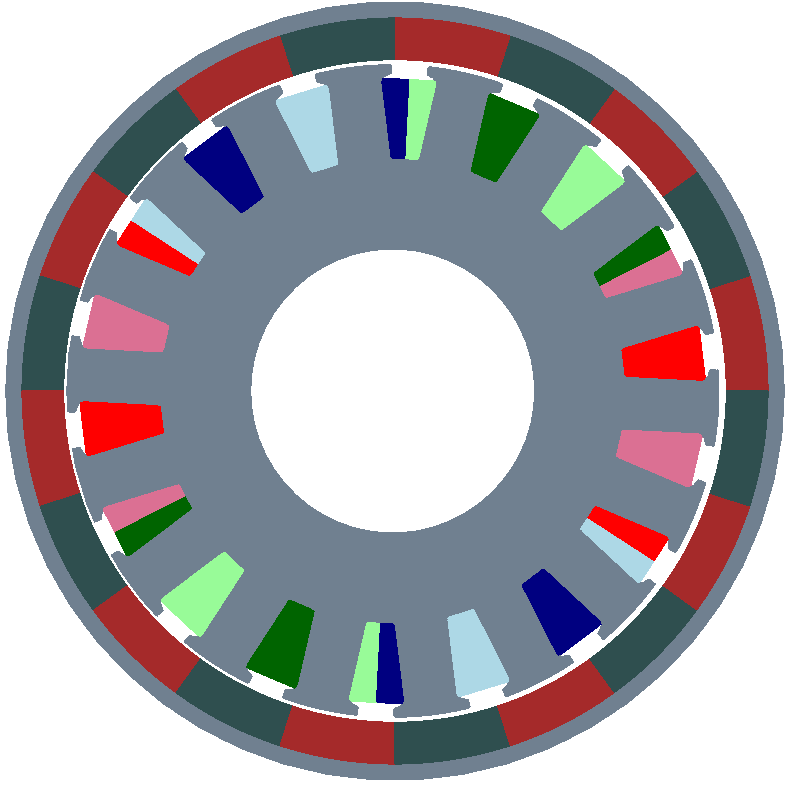
Inner rotor motor